tsp-drone-solver
Hybrid Truck & Drone Delivery Optimization 🚚🚁
A Mixed-Integer Linear Programming (MILP) solution for the Flying Sidekick Traveling Salesman Problem (FSTSP). This project optimizes last-mile delivery routes by coordinating a truck and a drone to minimize total operation time.
📌 Problem Overview
In modern logistics, combining traditional trucks with drones can significantly reduce delivery times. The truck acts as a moving launchpad, performing deliveries while launching a drone to serve customers within a radius $R$. The drone travels $K$ times faster than the truck and must return to the vehicle at a rendezvous node.
Key Constraints:
- Each customer is visited exactly once (by truck OR drone).
- The drone has a limited flight range ($R$) and capacity (1 package).
- Subtour elimination constraints ensure valid routing.
- The objective is to minimize the total time ($Z$) required to serve all $N$ customers and return to the depot.
🧮 Mathematical Model
The problem is modeled using Gurobi Optimizer.
Objective Function: \(\min \sum_{i,j} (K \cdot d_{ij} \cdot x_{ij}) + \sum_{i,j} (2 \cdot d_{ij} \cdot y_{ij})\)
Where:
- $x_{ij} \in {0,1}$: Truck travels from $i$ to $j$.
- $y_{ij} \in {0,1}$: Drone delivers to $j$ launching from $i$.
- $d_{ij}$: Euclidean distance.
- $K$: Speed factor (Truck/Drone ratio).
🚀 Results & Visualization
We tested the model on random instances (15 to 35 nodes). The hybrid approach demonstrated significant efficiency gains compared to the traditional Truck-Only TSP.
| Instance | Nodes | Truck Only Cost | Hybrid Cost | Improvement |
|---|---|---|---|---|
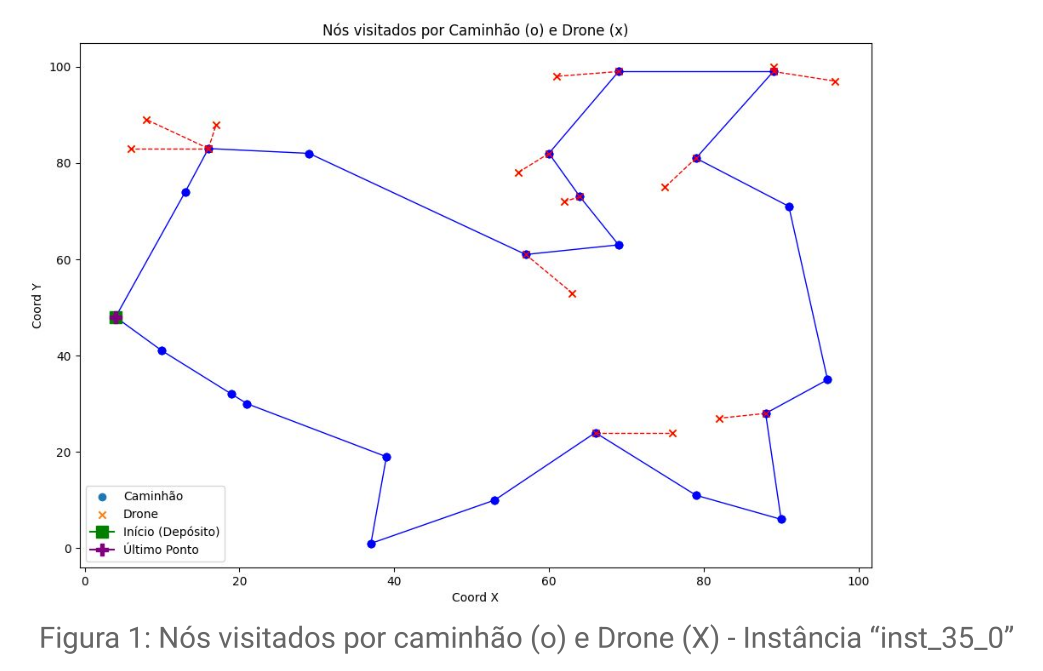
inst_35_0 |
35 | 3736.83 | 3324.46 | ~11% |
inst_20_1 |
20 | 2870.62 | 2677.91 | ~6.7% |
Optimized Route Visualization
Blue lines: Truck Path | Red dashed lines: Drone Flight
🛠️ Installation & Usage
- Clone the repository:
git clone [https://github.com/Dev-Toledo/tsp-drone-solver.git](https://github.com/Dev-Toledo/tsp-drone-solver.git) - Install dependencies
pip install -r requirements.txt - Run the solver: (Note: A valid Gurobi License is required. Academic licenses are free.)
python src/solver.py
👨💻 Tech Stack
Language: Python
Solver: Gurobi Optimizer (gurobipy)
Visualization: Matplotlib & Folium
📄 License
This project is licensed under the MIT License.
👤 Authors
Caio Toledo - Github / LinkedIn